Thank you! Yes, I had found both files, but was not clear that SPINOR_MISO, etc… actually directly translated to SPI2_MISO (or SPI2_DI). I know it’s not enabled by default - so what is needed to enable by default, just changes to line 230 in duo-buildroot-sdk/u-boot-2021.10/board/cvitek/cv180x/board.c
pinmux_config(PINMUX_SPI2);
So there is no need to make further changes to build/boards/cv180x/cv1800b_milkv_duo_sd/dts_riscv/cv1800b_milkv_duo_sd.dts?
Also, Enable SPI2 and the corresponding spidev on Milk-V Duo shows adding cs-gpios = <&porta 18 0>; to do dts – is that necessary?
What about the modification to cvitek_cv1800b_sophpi_duo_sd_defconfig shown in that post?
Here is my setup - the same setup that works without issue through /dev/spidev0.0 on Pi, etc…
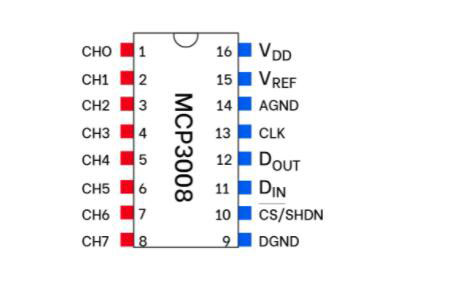
The MCP3008 chip:
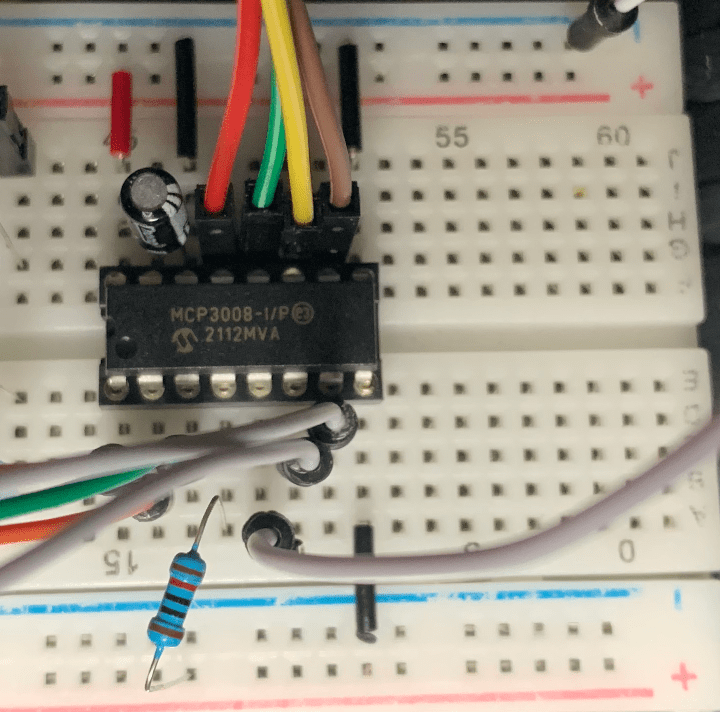
The chip configuration on breadboard:
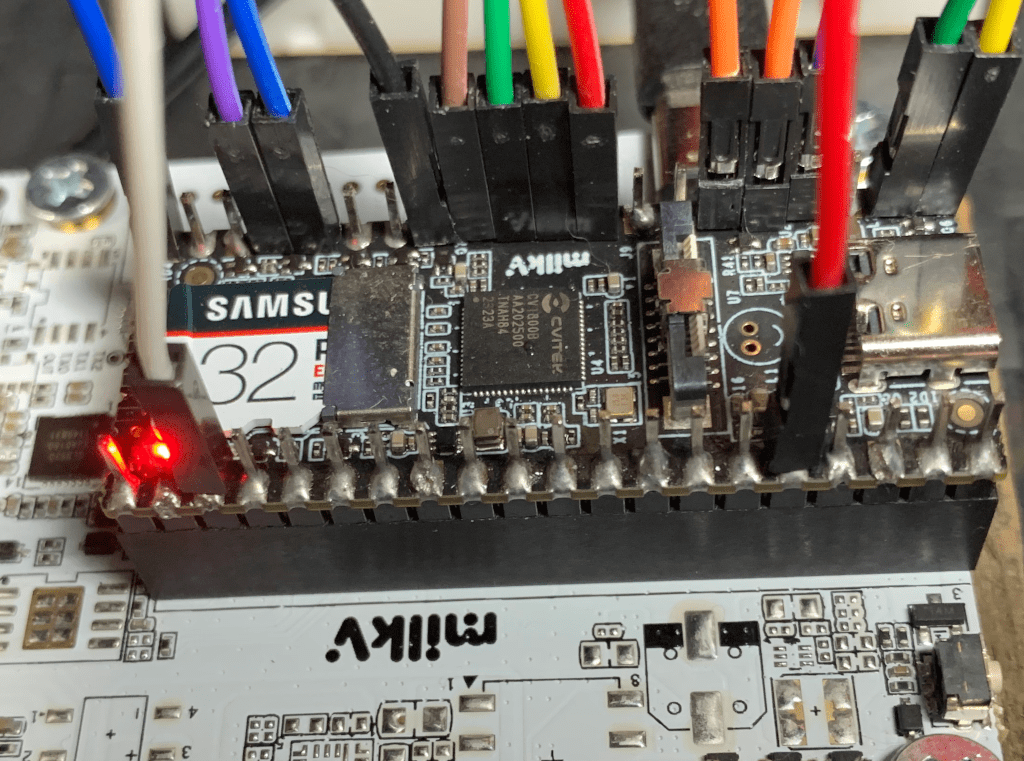
Connection on GP6 - GP9 on the Milkv-Duo:
The problem is when read through /dev/spidev0.0 there are nothing but stray voltages on various channels:
# mcp3008spi "/dev/spidev0.0" 100
opened SPI device: /dev/spidev0.0 on file descriptor: 3
mode : 0
bits : 8
clock : 1350000
delay : 5
samples : 100 (~20 seconds)
all channel output:
chan[0] : 0.00
chan[1] : 0.41
chan[2] : 0.00
chan[3] : 0.00
chan[4] : 0.83
chan[5] : 0.41
chan[6] : 0.00
chan[7] : 0.00
Where the voltages should be:
chan[0] : 1.69
chan[1] : 2.71
chan[2] : 1.36
chan[3] : 3.29
chan[4] : 0.00
chan[5] : 0.00
chan[6] : 0.00
chan[7] : 0.00
As shown by the ADS1115 ADC chip on II2C (same voltages going to the MCP3008 chip channels 0-3 just in different order) shown below:
# ads1115
ADS1115 each input channel (AINx) configured for
single-shot, 4.096V gain, 128 SPS
Outputting 100 analog input samples at 5Hz (~20 sec)
channel, reg-values and voltages:
channel[0] : 0x66d6 (3.29 V)
channel[1] : 0x34b8 (1.69 V)
channel[2] : 0x54b8 (2.71 V)
channel[3] : 0x2a5c (1.36 V)
So if everything is provided in the buildrood-sdk for SPI2 on /dev/spidev0.0 why is nothing working?
It just seems that there should be a /dev/spidev2.0 (bus 2 channel 0). Or do I just not understand how the Duo is configured?
For completeness, I’ll post the code as well:
#include <stdint.h>
#include <unistd.h>
#include <stdio.h>
#include <stdlib.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <linux/types.h>
#include <linux/spi/spidev.h>
typedef struct { /* SPI device struct for mcp3008 */
struct spi_ioc_transfer spi_xfer;
uint8_t buf[6];
int fd;
uint8_t mode,
cepin;
} spidev;
/* SPI and mcp3008 constants */
#define SPIDEVFS "/dev/spidev0.0"
#define BITS 8
#define CLOCK 1350000
#define DELAY 5
#ifdef MILKVFS
/* 3rd attempt with GPIOXX numbers - failed same vals as 2nd attempt
#define SPI_CLK 23
#define SPI_MOSI 22
#define SPI_MISO 21
#define SPI_CE 18
*/
/* 2nd attempt - very low voltage readings on wrong pins
* next try enabling spidev2 in cv1800b_milkv_duo_sd.dts?
*/
#define SPI_CLK 6
#define SPI_MOSI 7
#define SPI_MISO 8
#define SPI_CE 9
/* 1st attempt through /dev/spidev0.0 - failed - no readings at all
#define SPI_CE 17
#define SPI_MISO 16
#define SPI_MOSI 19
#define SPI_CLK 18
*/
#else
#define SPI_CE 8
#define SPI_MISO 9
#define SPI_MOSI 10
#define SPI_CLK 11
#endif
/**
* @brief initialize the SPI system (e.g. open "/dev/spidev0.0") and configure
* the device struct for reading from the mcp3008.
* @param spidevfs filesystem device node for SPI.
* @param dev pointer to struct holding mcp3008 configuration.
* @param delay microsecond delay for mcp3008 conversion (sample switching).
* @param clock SPI bus speed in Hz.
* @param bits bits per-bytes (e.g. CHAR_BITS).
* @param mode SPI_MODE_x (single-ended or pseudo-differential pairs).
* @param cepin CS/CE GPIO pin number.
* @return returns 0 on success, -1 otherwise.
*/
int spi_device_init (const char *spidevfs, spidev *dev, uint16_t delay,
uint32_t clock, uint8_t bits, uint8_t mode, uint8_t cepin)
{
/* initialize struct members */
dev->spi_xfer.tx_buf = (unsigned long)dev->buf;
dev->spi_xfer.rx_buf = (unsigned long)(dev->buf + 3);
dev->spi_xfer.len = 3;
dev->spi_xfer.delay_usecs = delay;
dev->spi_xfer.speed_hz = clock;
dev->spi_xfer.bits_per_word = bits;
dev->mode = mode;
dev->cepin = cepin;
/* open spi device in Linux sysfs */
if ((dev->fd = open (spidevfs, O_RDWR)) == -1) {
perror ("open spidevfs");
return -1;
}
/* set device mode */
if (ioctl (dev->fd, SPI_IOC_WR_MODE, &dev->mode) == -1) {
perror ("error init SPI_IOC_WR_MODE");
return -1;
}
/* set number of bits per word (byte) */
if (ioctl (dev->fd, SPI_IOC_WR_BITS_PER_WORD,
&dev->spi_xfer.bits_per_word) == -1) {
perror ("error init SPI_IOC_WR_BITS_PER_WORD");
return -1;
}
/* send requested SPI bus speed */
if (ioctl (dev->fd, SPI_IOC_WR_MAX_SPEED_HZ,
&dev->spi_xfer.speed_hz) == -1) {
perror ("error init SPI_IOC_WR_MAX_SPEED_HZ");
return -1;
}
/* read configured SPI bus speed */
if (ioctl (dev->fd, SPI_IOC_RD_MAX_SPEED_HZ,
&dev->spi_xfer.speed_hz) == -1) {
perror ("error init SPI_IOC_RD_MAX_SPEED_HZ");
return -1;
}
return 0;
}
/**
* @brief set channel to psuedo-differential compare mode.
* @param channel channel to set control bits on (SGL/DIF = 0, D2=D1=D0=0).
* @return returns control bits set for channel.
*/
uint8_t channel_cfg_differential (uint8_t channel)
{
return (channel & 7) << 4;
}
/**
* @brief set channel to single-ended input mode.
* @param channel channel to set control bits on (SGL/DIF = 1, D2=D1=D0=0).
* @return returns control bits set for channel.
*/
uint8_t channel_cfg_single (uint8_t channel)
{
return (0x8 | channel) << 4;
}
/**
* @brief read sample from mcp3008 for channel.
* @param dev pointer to mcp3008 device struct.
* @param channel analog input channel to read.
* @return returns raw 10-bit value for sample.
*/
int spi_read_adc (spidev *dev, uint8_t channel)
{
dev->buf[0] = 1;
dev->buf[1] = channel_cfg_single (channel);
dev->buf[2] = 0;
if (ioctl (dev->fd, SPI_IOC_MESSAGE(1), &dev->spi_xfer) == -1) {
perror ("ioctl SPI_IOC_MESSAGE()");
abort();
}
return ((dev->buf[4] & 0x03) << 8) |
(dev->buf[5] & 0xff);
}
/**
* @brief simple output of all mcp3008 channels using ANSI escape
* to overwrite values in place.
* @param f array of float values to display.
* @param n numer of elements in f.
*/
void prn_all_channels (float *f, int n)
{
char fmt[32] = "";
for (int i = 0; i < n; i++) {
printf (" chan[%d] : % 5.2f\n", i, f[i]);
}
sprintf (fmt, "\033[%dA", n);
printf (fmt);
}
int main (int argc, char **argv) {
const char *spidevfs = SPIDEVFS;
uint8_t channel = 0;
unsigned nsamples = 300;
spidev dev = { .spi_xfer = {0}};
if (argc > 1) { /* set SPI devfs pathname (if given) */
spidevfs = argv[1];
}
if (argc > 2) { /* set the number of samples, (default 300) */
unsigned tmp;
if (sscanf (argv[2], "%u", &tmp) != 1) {
fprintf (stderr, "error: invalid unsigned count for argv[2] (%s)\n",
argv[2]);
return 1;
}
nsamples = tmp;
}
if (argc > 3) { /* set single channel to read, (default all channels) */
uint8_t tmp;
if (sscanf (argv[3], "%hhu", &tmp) != 1 || tmp > 7) {
fprintf (stderr, "error: invalid channel given on argv[3] (%s)\n",
argv[3]);
return 1;
}
channel = tmp;
}
/* initialize spidev interface and validate */
if (spi_device_init (spidevfs, &dev, DELAY, CLOCK, BITS,
SPI_MODE_0, SPI_CE) == -1) {
return 1;
}
printf ("opened SPI device: %s on file descriptor: %d\n"
" mode : %d\n"
" bits : %hhu\n"
" clock : %u\n"
" delay : %hu\n"
" samples : %u (~%u seconds)\n\n",
spidevfs, dev.fd, dev.mode, dev.spi_xfer.bits_per_word,
dev.spi_xfer.speed_hz, dev.spi_xfer.delay_usecs,
nsamples, nsamples / 5);
if (argc > 3) { /* if channel argument provides display single-channel */
puts ("single channel output:\n");
/* do single-channel ADC read at 5Hz */
for (unsigned i = 0; i < nsamples; i++) {
int val = spi_read_adc (&dev, channel);
float res = (float)val / 1023.f * 3.3f;
printf (" chan[%d] : % 5.2f\n\033[1A", channel, res);
usleep (200000);
}
}
else { /* otherwise display sample values for all channels */
puts ("all channel output:\n");
/* do read of all channels at 5Hz */
for (unsigned i = 0; i < nsamples; i++) {
float fvals[8] = {0};
for (uint8_t chan = 0; chan < 8; chan++) {
int val = spi_read_adc (&dev, chan);
fvals[chan] = (float)val / 1023.f * 3.3f;
}
prn_all_channels (fvals, 8);
usleep (200000);
}
fputs ("\033[8B\n", stdout);
}
close (dev.fd);
return 0;
}
The following is a short Makefile I use with most test code project on the Duo (changed as needed):
TARGET = mcp3008spi
CC = $(TOOLCHAIN_PREFIX)gcc
CFLAGS += -I$(SYSROOT)/usr/include -I./include
CFLAGS += -Wall -Wextra -pedantic -Wshadow -std=c11
CFLAGS += -D_GNU_SOURCE
CFLAGS += -DMILKVFS
LDFLAGS += -L$(SYSROOT)/usr/lib -L$(SYSROOT)/lib -lrt
SOURCE = $(wildcard *.c)
OBJS = $(patsubst %.c,%.o,$(SOURCE))
$(TARGET): $(OBJS)
$(CC) -o $@ $(OBJS) $(LDFLAGS)
%.o: %.c
$(CC) $(CFLAGS) -o $@ -c $<
.PHONY: clean
clean:
@rm -rf *.o
@rm -rf $(OBJS)
@rm -rf $(TARGET)