I tried to use RTOS core for quick GPIO operation but I found out that there are unbelievable latency in GPIO interrupts. I feed pulses on input GPIO and get a feedback through GPIO to see the delay between the event and the response.
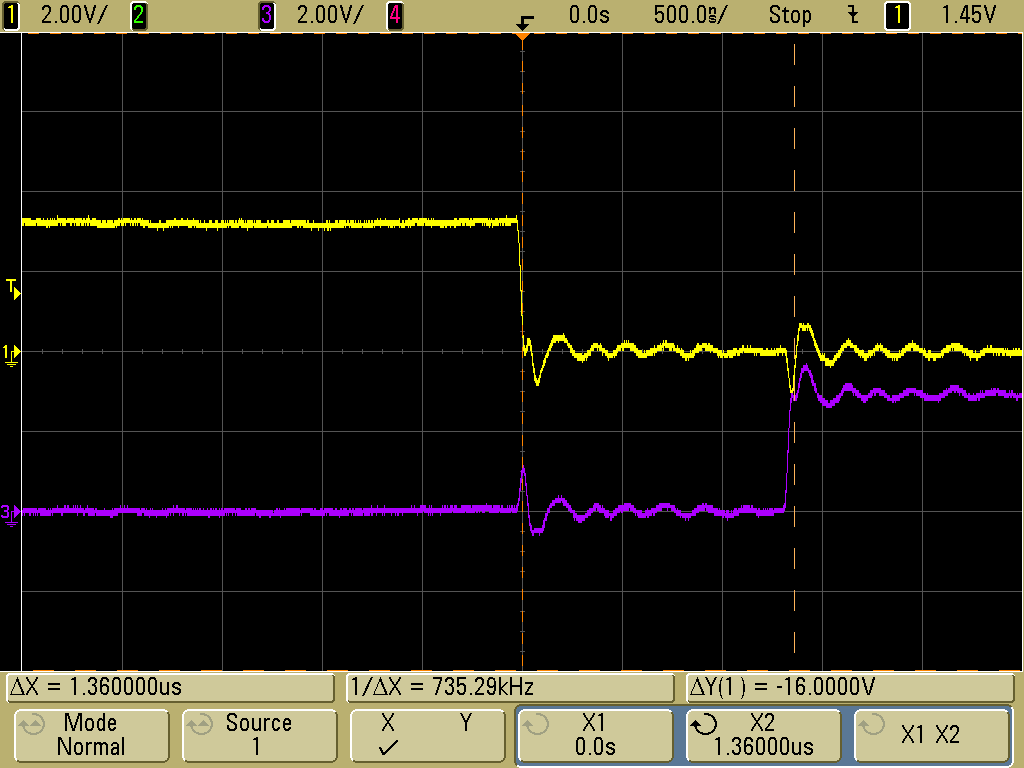
I attached a screenshot from the oscilloscope to show an issue.
The yellow line is an input signal (GPIOA[23], falling edge) and the purple line is the response via GPIOA[22]. A delay between input signal and response is 1.36 uS (!!!) that means I can’t service interrupts fater than 700 kHz which sound ridiculous for the CPU with 700 MHz clock.
There are my functions:
void prvGpioISR(void)
{
static const uint32_t base_addr = XGPIO + GPIO_SIZE * PORT_A; //GPIOA base address
static uint8_t pingpong = 1; // ping-pong flag
mmio_write_32(base_addr + GPIO_PORTA_EOI, 0xFFFFFFFF); // Clear interrupt flag
writePin(PORT_A, 22, pingpong); // Toggle output pin every interrupt
pingpong ^= 1;
}
void writePin( uint8_t port, uint8_t pin, uint8_t value )
{
uint32_t base_addr = XGPIO + GPIO_SIZE * port; // GPIO base address
uint32_t val = mmio_read_32( base_addr + GPIO_SWPORTA_DR);
val = (value == GPIO_HIGH ? ( val | BIT(pin) ) : ( val & (~BIT(pin))));
mmio_write_32(base_addr + GPIO_SWPORTA_DR, val);
}
Could anyone tell me how to decrease latency? What the reason for it?
2 Likes
Could you also share how you setup your ISR?
Sure.
// Initial function
void main_cvirtos(void)
{
// Start the tasks
request_irq(MBOX_INT_C906_2ND, prvQueueISR, 0, "mailbox", (void *)0);
request_irq(GPIO0_INTR_FLAG, prvGpioISR, 0, "gpio", (void *)0);
main_create_tasks();
vTaskStartScheduler();
}
// Gpio task function
void prvGpioIntTask(void *pvParameters)
{
(void)pvParameters; // Ignore parameters
pinMode(PORT_A, 23, GPIO_INPUT); // Input pin
pinMode(PORT_A, 22, GPIO_OUTPUT); // Pin for DEBUG purpose
configureInterruptPin(PORT_A, 23, GPIO_INT_FALLING);
...
}
// Function configure pin as interrupt source
void configureInterruptPin(uint8_t port, uint8_t pin, uint8_t intMode)
{
uint32_t base_addr = XGPIO + GPIO_SIZE * port;
// Set interrupt by edge
mmio_clrsetbits_32(base_addr + GPIO_INTTYPE_LEVEL, 0, BIT(pin));
if(intMode)
// Rising edge
mmio_clrsetbits_32(base_addr + GPIO_INT_POLARITY, 0, BIT(pin));
else
// Falling edge
mmio_clrsetbits_32(base_addr + GPIO_INT_POLARITY, BIT(pin), 0);
// Set debounce = ON
//mmio_clrsetbits_32(base_addr + GPIO_DEBOUNCE, 0, BIT(pin));
// Clear pending interrupts
mmio_write_32(base_addr + GPIO_PORTA_EOI, 0xFFFFFFFF);
// Enable inerrupt for selected pin
mmio_clrsetbits_32(base_addr + GPIO_INTEN, 0, BIT(pin));
}
// Function configure mode of pin (input or output)
void pinMode( uint8_t port, uint8_t pin, uint8_t value )
{
mmio_clrsetbits_32(
XGPIO + GPIO_SIZE * port + GPIO_SWPORTA_DDR,
BIT( pin ), // CLEAR mask
value ? BIT( pin ) : 0 // SET mask
);
}